
Anchor point
-
@iTap-Development [0_1507239850952_rotate.tap](Uploading 100%) Here’s a trig version lol. Aww I don’t have the privileges to upload the actual file lol. Link: http://bit.ly/2yrzlps
@Aidan-Oxley great I’ll check it out tomorrow....because it’s 9:00 pm here and I’m tired!
-
@iTap-Development [0_1507239850952_rotate.tap](Uploading 100%) Here’s a trig version lol. Aww I don’t have the privileges to upload the actual file lol. Link: http://bit.ly/2yrzlps
@Aidan-Oxley hey could you explain the “initial angle” box container and how you’re using it?
-
@Aidan-Oxley hey could you explain the “initial angle” box container and how you’re using it?
@iTap-Development It’s the angle from the anchor to the object when the object is at rotation 0°. For example, anchor is 1 metre up and 1 metre to the right (so both positive), so when the object is at 0° rotation, the angle from the anchor to the object is 225° (so that’s down-left). Hope this makes sense.
-
@iTap-Development It’s the angle from the anchor to the object when the object is at rotation 0°. For example, anchor is 1 metre up and 1 metre to the right (so both positive), so when the object is at 0° rotation, the angle from the anchor to the object is 225° (so that’s down-left). Hope this makes sense.
@Aidan-Oxley hey, so I’m just coming back to this(I got a 3d printer so I’ve been busy with that!);
What do you need the “initial angle” for?
And I’m not sure as to the purpose of the behaviors in the screen shot.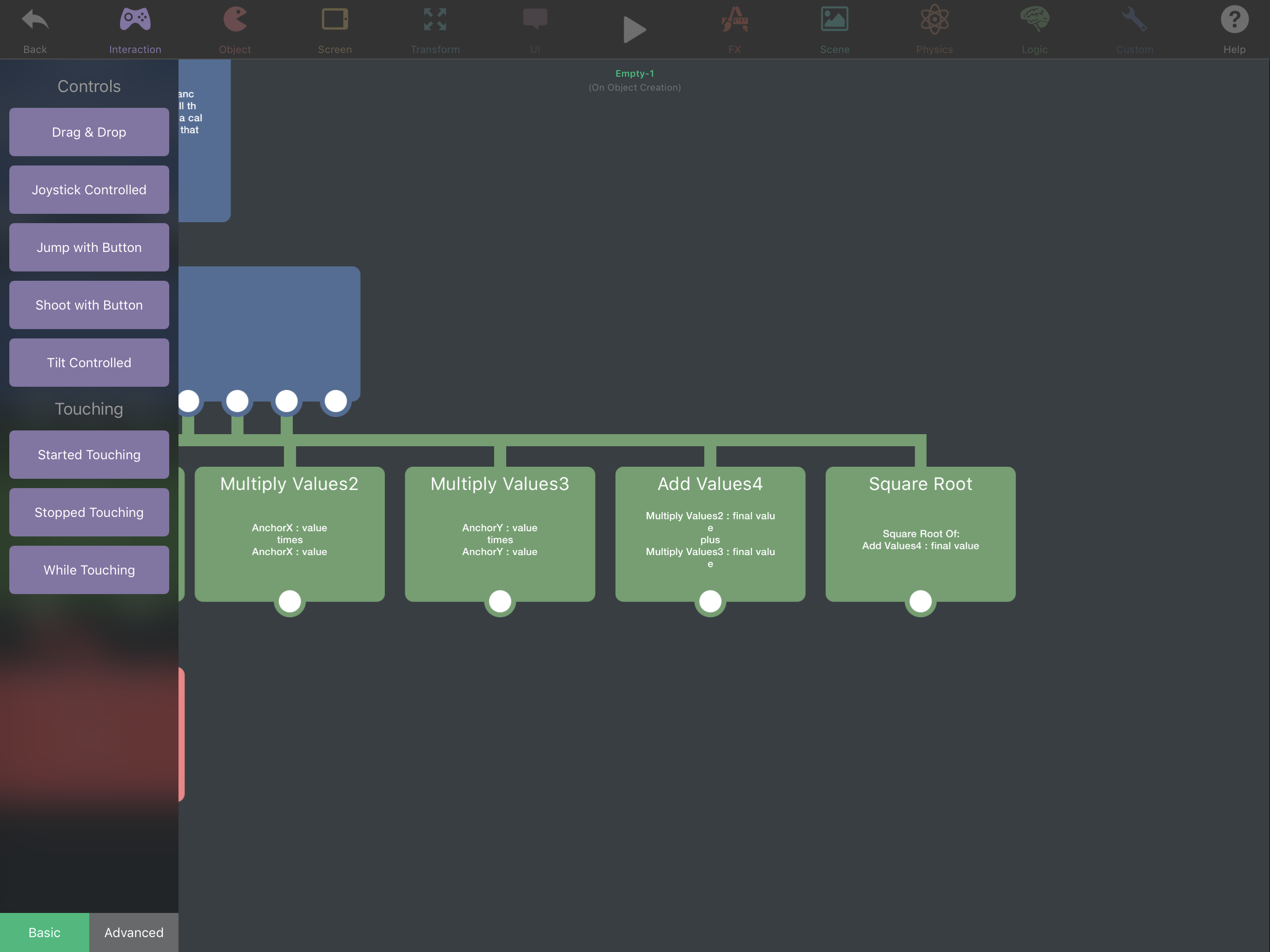
-
@Aidan-Oxley hey, so I’m just coming back to this(I got a 3d printer so I’ve been busy with that!);
What do you need the “initial angle” for?
And I’m not sure as to the purpose of the behaviors in the screen shot.@iTap-Development those behaviours are Pythagoras' theorem. The result from the square root is the distance from the centre to the anchor point.
-
@Aidan-Oxley hey, so I’m just coming back to this(I got a 3d printer so I’ve been busy with that!);
What do you need the “initial angle” for?
And I’m not sure as to the purpose of the behaviors in the screen shot.@iTap-Development Jack is right. This is how you work out the diagonal distance between two points if you know their coordinates.
-
@Aidan-Oxley hey, so I’m just coming back to this(I got a 3d printer so I’ve been busy with that!);
What do you need the “initial angle” for?
And I’m not sure as to the purpose of the behaviors in the screen shot.@iTap-Development A hacky, tacky way to achieve the goal:
Create a dummy object that you'll use as a virtual anchor point. Use the physics weld joint to bind your rotating object to the dummy object at the position you want relative to the virtual anchor point. Then rotate the dummy object. This should give you the result you want, but will ruin anything else regarding physics.
But I agree. The anchor point should be respected by the rotate behaviour.
-
@iTap-Development A hacky, tacky way to achieve the goal:
Create a dummy object that you'll use as a virtual anchor point. Use the physics weld joint to bind your rotating object to the dummy object at the position you want relative to the virtual anchor point. Then rotate the dummy object. This should give you the result you want, but will ruin anything else regarding physics.
But I agree. The anchor point should be respected by the rotate behaviour.
@Deeeds that would work kinda, but yeah it wouldn’t work well in some ways.
-
@iTap-Development Jack is right. This is how you work out the diagonal distance between two points if you know their coordinates.
-
@Aidan-Oxley @Jack8680 oh duh! So you are just multiplying the x and y by them selves for the x and y distance to the other point?
I think I always just added the actual x and y distances.@iTap-Development You know Pythagora’s theorem? If you have a right angle triangle, a is the length of one side, b is the length of the other and c is the length of the hypotenuse (the longest one, diagonal if a is x and b is y), then c² = a² + b². What I was trying to work out is the diagonal distance between two points. I can easily get the x and y distance between them, but I wanted diagonal.
-
@iTap-Development You know Pythagora’s theorem? If you have a right angle triangle, a is the length of one side, b is the length of the other and c is the length of the hypotenuse (the longest one, diagonal if a is x and b is y), then c² = a² + b². What I was trying to work out is the diagonal distance between two points. I can easily get the x and y distance between them, but I wanted diagonal.
@Aidan-Oxley sorry! I was confusing with something else in my project 🤦♂️ I’ve only got a few hours of sleep every night for a week due to my 3d printer addiction! so my brain doesn’t work....
-
@iTap-Development You know Pythagora’s theorem? If you have a right angle triangle, a is the length of one side, b is the length of the other and c is the length of the hypotenuse (the longest one, diagonal if a is x and b is y), then c² = a² + b². What I was trying to work out is the diagonal distance between two points. I can easily get the x and y distance between them, but I wanted diagonal.
@Aidan-Oxley so why are you multiplying the sine and cosine angles by the diagonal distance?
-
@Aidan-Oxley so why are you multiplying the sine and cosine angles by the diagonal distance?
@iTap-Development I don’t remember lol. There is a reason though. It’s probably one of those formulas like hypotenuse = sin(θ) × opposite.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login